Researchers have developed a way to train robots with just a little push at Rice University. Their technique uses algorithms that allow robots to not only respond to a human’s touch in the moment but alter their trajectory based on that physical input. “Here the robot has a plan, or desired trajectory, that describes, however, the robot thinks it should perform the task,” said graduate student Dylan Losey about the project. “We introduced a real-time algorithm that changed, or deformed, the robot’s future desired trajectory.”
Typically, when robots are programmed to respond to physical contact from a person’s, they usuallymetimes} only do so in the moment and go right back to their original trajectory soon thereafter. but with the Rice team’s algorithms, their robots were able to take that input and use it to adjust their trajectories in real time. “By replanning the robot’s desired trajectory after each new observation, the robot was able to generate behavior that matches the human’s preference,” said Losey.
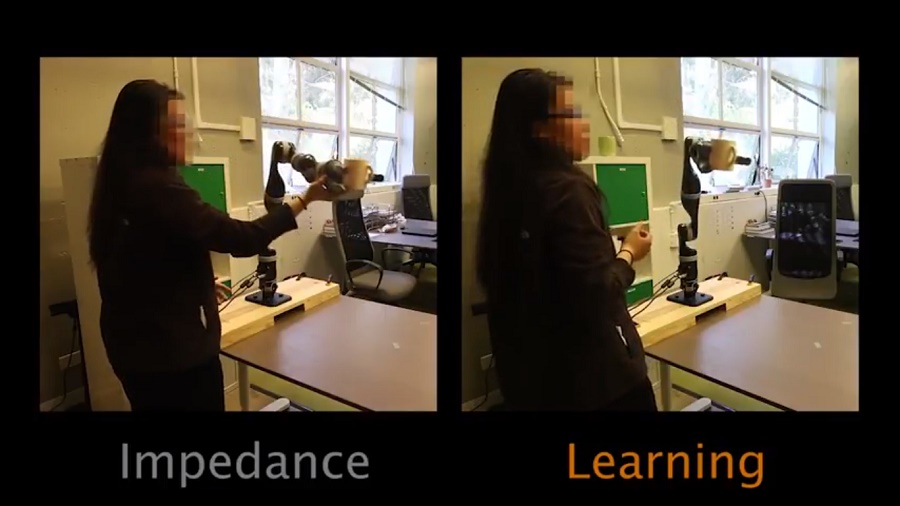
You can check out the robot in action in the video. The researchers show that when the robot was in a typical impedance method, people could only adjust the robot’s movements temporarily and modifying the path in any real way took constant adjusting. but when it had been placed in learning mode, a single adjustment could set the robot on a new, more desirable path. “The paradigm shift in this work is that instead of treating a human as a random disturbance, the automaton ought to treat the human as a rational being United Nations agency has a reason to interact and is trying to convey something important,” Losey said in a statement. “The robot should not just try to get out of the way. It should learn what is going on and do its job better.”
The research was published in IEEE Transactions on robotics.


